10 Micron GM 1000 HPS
Praxis
Seit 2013 nütze ich für die Astrofotografie eine 10Micron GM1000 HPS. Seitdem hatte ich die Montierung mit einem 8″ Vixen VC200L, einem 4,5″ Newton und einem 10″ Lacerta Newton im Einsatz. Alle meine Astroaufnahmen mache ich von meinem Balkon aus. Das Teleskop und die Montierung werden jedes Mal auf einer feststehenden Säule aufgebaut, das dauert etwa 15 min. Die Einrichtung und die eigentliche Poljustierung der GM 1000 HPS nehmen nochmal ca. 20 min in Anspruch. In der gesamten Beobachtungsnacht sind an der Montierung keine Neueinstellungen erforderlich. Das lästige und zeitintensive Einrichten eines Autoguiders entfällt. Bisher sind alle Astroaufnahmen unguided, also ohne Autoguider entstanden. Die fotografische Nutzung ohne Autoguider ist ein unschätzbarer Vorteil, ich kann jede Minute der Beobachtungsnacht in Belichtungszeit umsetzen. Selbst ein Schwenk vom Ost-zum Westhimmel ist kein Problem, es kann sofort eine weitere Belichtungsreihe gestartet werden.
Montierung
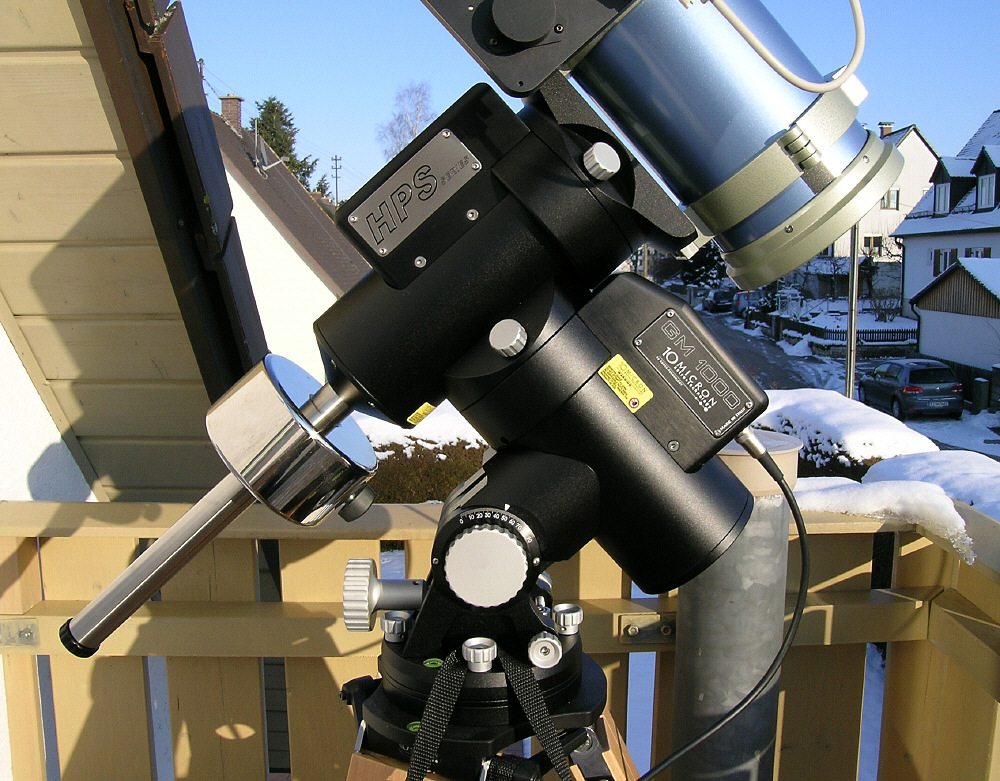
Das Eigengewicht des Achskreuzes liegt bei 19,5 kg. Dazu kommen die verschraubbare Gegengewichtsstange mit ca. 1,5 kg sowie Gegengewichte mit 3 kg (klein) und 6 kg (groß). Sämtliche Teile des hochwertig verarbeiteten Montierungskörpers sind aus gefrästem Edelstahl und Aluminium gefertigt. Die Oberfläche ist glasperlengestrahlt und schwarz harteloxiert. Der eigentliche Aufbau gestaltet sich unkompliziert. Zunächst wird die stabile Adapterplatte montiert. Diese nimmt den gesamten Polblock der GM 1000 HPS auf. Fixiert wird die Montierung mit vier Rändelschrauben (M 6) in passend im Radius gefrästen Langlöchern. Zwei entgegengesetzte Schrauben drücken auf einen am hinteren Ende gelegenen Zapfen und ermöglichen damit eine Drehung der Montierung nach Westen oder Osten. Der Polhöhenblock ist massiv ausgearbeitet, die Polhöhe ist mit Hilfe einer großen Einstellschraube und eines echten Schneckenradabschnitts im Polblock sehr exakt und feinfühlig einzustellen. Eine Wasserwaagen-Libelle ist ebenso gut sichtbar integriert. Die Achsen der R.A.-und Dekl.-Einheit sind mit Rutschkupplungen versehen, deren Gängigkeit mit je zwei Handknebeln eingestellt werden kann. Am oberen Ende der Deklinationsachse befindet sich eine aus einem Stück gefräste duale Prismenklemme mit zwei massiven Klemmstücken für die Aufnahme von Teleskopen. Sie adaptiert sowohl alle 3″-Schienen (Losmandy-Norm) als auch alle sogenannten EQ-Schienen (Celestron, Skywatcher und Vixen). Die Motoren/Encoder/Getriebe-Einheiten sind komplett in Metall gekapselt. Motor-und Encoderkabel sind alle unsichtbar intern verlegt.
Mechanik
Die GM 1000 HPS (High Precision and Speed) wird konventionell über Schnecke und Schneckenrad mit Hilfe von AC-Servomotoren angetrieben. Die Schneckenräder sind aus Bronze gefertigt, während die Schnecke und die Achse selbst jeweils aus legiertem Stahl bestehen. Dabei sind außer den üblichen Motor-Encodern auch direkt an der Rektaszensions-und Deklinationsachse hochgenaue Absolut-Encoder angebracht, die mit mehr als 10 Mio. Messpunkten kalibriert sind. Die QCI-Steuerung wertet diese Informationen fast in Echtzeit aus und führt, falls nötig, sofort eine Korrektur durch. Mit der Kombination von je zwei elektronischen Regelkreisen je Achse vereint die GM 1000 HPS die Vorteile einer konventionellen Montierung (selbsthemmendes Getriebe, hohe Haltekraft bei Lastwechseln), mit einer hervorragenden Exaktheit der Nachführung auch ohne Autoguiding. Fehler, die zwischen Motor-und Achsencoder auftreten, wie z.B. Ungenauigkeiten der Mechanik, Durchbiegungen etc. werden erfasst und ausgeglichen. Die Montierung erkennt zudem immer mit größter Genauigkeit ihre Position, selbst wenn die Achsen von Hand gelöst werden. Der Nachteil dieser Montierungsbauweise ist der bei Schneckengetrieben trotz genauester Verarbeitung auftretende Schneckenfehler, der sich bei der HPS-Montierung auf bis zu +/-0,25″ reduziert.
QCI-Steuerung
Die GM 1000 HPS verfügt über ein komplett selbständiges Steuersystem mit einem Linux-AMD-Prozessor. Das System ist rechnerunabhängig. Es besteht aus der eigentlichen Motorsteuerung und einer Handbox mit zweizeiligem Display. Die Handbox ist mit einer gepolsterten Schutzhülle versehen, die an der Frontseite ein Klarsichtfenster hat. Die gesamte Software ist bereits installiert, das Gerät ist nach dem etwa 1-minütigen Bootvorgang sofort einsatzbereit. Lediglich ein Kabel an der Rückseite des Rektaszensionsmotors verbindet die Montierung mittels eines wasserdicht verschraubbaren Steckers mit der Steuerbox. Die QCI- Steuerung bietet eine Reihe an speziellen Funktionen für die Astrofotografie, wie z.B. verschiedene elektronische Alignment Algorithmen, elektronische Balancierung, Speicherung von Pointing Modellen. (s. Technische Daten). Zudem ist die Software durch Internet-Updates aktualisierbar.
Anschlüsse:
– R.A.-und Dekl.-Motoren
– ST4-Autoguiderport
– RS-232-Port (Steuerung über Planetariumssoftware möglich)
– Ethernet-Port
– GPS-Port
– Handbox
– externer Kontakt zum Ein-und Ausschalten der Montierung
– zusätzlicher Hilfseingang (AUX)
– Stromversorgung (24V)
Poljustierung
Die Poljustierung funktioniert unter Zuhilfenahme verschiedener elektronischer Einnordungsroutinen. Ein Polsucher wird nicht benötigt, nicht einmal die Sichtbarkeit von Polaris ist notwendig. Im Menü 3 Stars-Alignment werden zuerst 3 verschiedene Sterne nacheinander aus einer vorgegebenen Referenzsternliste angefahren, mit den Richtungstasten der Handbox exakt in die Mitte des Fadenkreuzes gebracht und mit „Enter“ bestätigt. Für das Zentrieren der Refernzsterne ist die Verwendung einer DSLR-oder CCD-Kamera und eines virtuellen Fadenkreuzes zu empfehlen. Die Software misst bei jedem angefahrenen Stern die Soll-und -Ist-Position, ermittelt den jeweiligen Fehlbetrag und speichert ein Pointing-Modell. Bei jedem Stern wird eine neue Berechnung durchgeführt, um in jeder Position des Teleskops eine möglichst perfekte Korrektur der Positionierungs-und Nachführfehler zu erreichen. Je mehr Sterne in das Pointing-Modell integriert werden können, desto größer ist die Kompensation der Positions-und Nachführfehler. Zu Ende der Poljustierung wird mit der Funktion „Polar Align“ aus der Liste ein Stern möglichst im Süden ausgesucht und mit der GoTo-Funktion angesteuert. Die Polachse ist noch nicht optimal nach dem Himmelspol ausgerichtet, daher wird das Teleskop den Stern knapp verfehlen. Dieser Stern wird abschließend wieder in die Mitte des Fadenkreuzes zentriert, diesmal aber nicht mit den Richtungstasten der Handsteuerung, sondern mit der Polhöhen-und Azimutfeineinstellung. In einem eigenen Menü kann man sich die Soll-und Ist-Position der Polachse anzeigen lassen. Das abgespeicherte Pointing-Modell kann bei stationären Betrieb der Montierung immer wieder verwendet werden. Die Montierung bleibt dabei perfekt eingenordet, beim nächsten Astrofotografieeinsatz kann man also sofort loslegen, ohne jegliche Einstellungen an der GM 1000 HPS vornehmen zu müssen. Werden bei einem festen Standort verschiedene Teleskope eingesetzt, ist es möglich, für jedes Teleskop ein eigenes Pointing-Modell zu erstellen und für das entsprechende Teleskop abzurufen. Nach Ende der Beobachtungsnacht fährt die Montierung auf Wunsch eine fest definierte Parkposition an.
Technische Daten
Typ: parallaktische deutsche GoTo-Montierung
Montierungsgewicht: 19,5 kg (ohne Zubehör)
Tragkraft: 25 kg
Breitengradbereich: 0°-82° (90° optional)
Azimut Feineinstellungsbereich: +/- 7,5°
Antrieb: 24 V-AC-Servomotoren mit zusätzlichen Absolut-Encodern
Schneckenräder: 250 Zähne, 125 mm Durchmesser (Bronze)
Schnecke: 20 mm Durchmesser
Achsen: 30 mm Durchmesser (legierter Stahl)
Gegengewichtsstange: 30 mm Durchmesser (Edelstahl), Gewicht 1,5 kg
Stromversorgung: 24 V/3 A
GoTo Geschwindigkeit: einstellbar von 2°/s – 15°/s
Positionierungsgenauigkeit: < 20″ mit internem Software Mapping (max. 100 Sterne), zusätzliche Software (Model Maker) für automatisches Alignment nutzbar (optional)
Mittlere Nachführgenauigkeit: 1″ typisch für 15 min, ~0,6″ RMS mit internem 25-Sterne Software Mapping
Sicherheitsstopp: +/- 30° hinter Meridian in R.A. (Software) +/- 45° hinter Meridian in R.A. (mechanisch)
Kraftübertragung: Backlash-freies System mit Zahnriemen und automatischer Backlash-Korrektur
Poljustierung: Alignment-Algorithmen per Steuerung
Steuerung: QCI-Steuergerät mit Linux-Betriebssystem inkl. Handbox (rechnerunabhängig)
PC Steuerung: Remote control über RS-232, Ethernet, eigener Ascom Treiber, LX200 kompatibles Protokoll
Firmware Funktionen: – 2-und 3 Sterne-Alignment Funktion, Speicherung von mehreren Pointing Modellen möglich
bis zu 100 Alignment Sterne für Modellbildung
– Korrektur von Pol-und Winkelfehlern
– manuelle, automatische oder GPS basierende Zeit-und Koordinateneinstellung
– elektronische Balancierung
– definierbare Parkpositionen
– Remote Support über Internet Verbindung
Datenbasis: – Sterne (Namen, Bayer, Flamsteed), Bright Star Katalog, SAO, HIP, HD, PPM, ADS, GCVS
Deep Sky (M, NGC, IC, PGC, UGC)
Sonnensystem (Sonne, Mond, Planeten, Asteroiden, Kometen, künstliche Satelliten)