10 Micron GM 1000 HPS
Practice
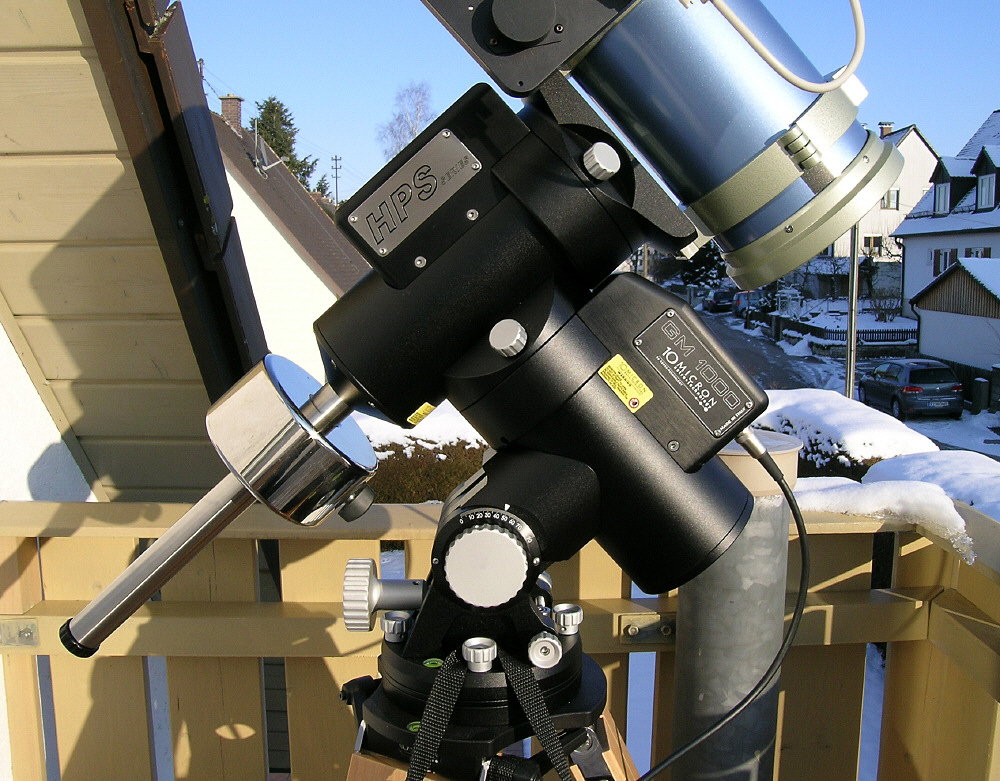
Since 2013 I use a 10Micron GM1000 HPS for astrophotography. Since then I used the mount with a 8″ Vixen VC200L, a 4.5″ Newton and a 10″ Lacerta Newton. I take all my astronomical images from my balcony. The telescope and the GM 1000 HPS are mounted each time on a fixed pillar, which takes about 15 minutes. The setup and the actual pole adjustment of the GM 1000 HPS take another 20 minutes. During the entire night of observation no new adjustments to the mount are necessary. The annoying and time-consuming setup of an autoguider is no longer necessary. So far, all astro shots have been taken unguided, the photographic use without autoguider is an invaluable advantage, I can use every minute of the observation night time. Even a Meridian Flip is no problem, you can immediately start another exposure series.
Mount
The weight of the mounts is 19.5 kg. In addition, there is the screwable counterweight shaft with 1.5 kg and counterweights with 3 kg (small) and 6 kg (large). All parts of the high-quality processed mounting body are made of milled stainless steel and aluminium. The surface is glass bead blasted and black hard anodized. The construction is uncomplicated. First the base adapter flange is installed. This takes up the entire pole block of the GM 1000 HPS. The mount is fixed with four knurled screws ( M6 ) in oblong holes. Two opposing screws press on a pin located at the rear end, thus allowing the mount to be rotated to the west or east. The mount block is massively worked out, the latitude range can be adjusted very exactly and sensitively with the help of a large adjusting screw and a real worm wheel section in the mount block. A spirit level is also visibly integrated. The axes of the R.A. and Decl. unit are equipped with slipping clutches, the movement of which can be adjusted with two clamps each. At the upper end of the declination axis, there is a special dual dovetail adapter plate milled from one piece with two solid clamping pieces for holding telescopes. It adapts 3″ Losmandy and 44 mm (Celestron, Vixen) dovetails. The motor/encoder/gear units are completely encapsulated in metal and all motor and encoder cables are invisibly laid internally.
Mechanics
The GM 1000 HPS (High Precision and Speed) is conventionally driven by worm and worm wheel with the help of AC servo motors. The worm wheels are made of bronze, while the worm and the axle themselves are made of alloy steel. In addition to the usual motor encoders, the rectascension and declination axis is equipped with high-precision absolute encoders, which are calibrated with more than 10 million measuring points. The QCI control evaluates this information almost in real time and, if necessary, executes it and will make a correction immediately. With the combination of two electronic control loops per axis, the GM 1000 HPS combines the advantages of a conventional mounting (self-locking gear, high holding force during load changes) with excellent tracking accuracy even without autoguiding. Errors that occur between motor and axis encoders, such as inaccuracies in the mechanics, deflections, etc. are recorded and compensated. The mount also always detects its position with the greatest accuracy, even if the axes are released manually. The disadvantage of this mounting method is the worm error occurring in worm gears despite the most precise processing, which is reduced in the HPS mounting to up to +/-0.25″.
QCI Control
The GM 1000 HPS has a completely independent control system with a Linux-AMD-processor. The system is computer independent. It consists of the actual motor control and a hand box with a two-line display. The handbox is provided with a padded cover, which has a transparent window on the front side. The entire software is already installed, the device is immediately ready for use after a boot time of about 1 minute. Only a cable at the back of the right ascension motor connects the mount with the control box by means of a waterproof screwable plug. The QCI control offers a number of special functions for astrophotography, such as various electronic alignment algorithms, electronic balancing, storage of pointing models. (see technical data). In addition, the software can be updated via Internet updates.
Connections:
– R.A. and Decl. motors
– ST4-Autoguiderport
– RS-232-Port (control via planetarium software possible)
– Ethernet port
– GPS-Port
– hand box
– external contact for switching the mount on and off
– additional auxiliary input (AUX)
– Power supply (24 V)
Polar Adjustment
The polar adjustment works with the aid of various electronic adjustment routines. A polar finder is not needed, not even the visibility of Polaris is necessary. In the menu 3 Stars-Alignment first 3 different stars are approached one after the other from a given reference star list, brought exactly into the middle of the crosshairs with the direction keys of the handbox and confirmed with “Enter”. For centering the reference stars, the use of a DSLR or CCD camera and a virtual crosshair is recommended. The software measures the nominal and actual position for each star approached, determines the respective deviation and saves a pointing model. For each star, a new calculation is carried out in order to achieve a perfect correction for the positioning and tracking errors in each position of the telescope.
The more stars can be integrated into the pointing model, the greater the compensation for position and tracking errors. At the end of the polar adjustment a star is selected from the list with the function “Polar Align” and controlled with the GoTo-function. The polar axis is not yet optimally aligned to the celestial pole, so the telescope will just miss the star. This star is finally centered again in the middle of the crosshairs, this time not with the direction keys of the manual control, but with the latitude and azimuth fine adjustment. In a separate menu you can display the nominal and actual position of the polar axis. The stored pointing model can be used again and again during stationary operation of the mount. The mount remains perfectly aligned, so you can start immediately with your next astrophotography session without having to make any adjustments to the GM 1000 HPS. If different telescopes are used at a fixed location, it is possible to create a separate pointing model for each telescope
and retrieve it for the appropriate telescope. At the end of the observation night, the mount can move to a fixed parking position if required.
Technical data
Type: parallactic german GoTo-mount
Weight: 19.5 kg (without accessories)
Instrument payload capacity: 25 kg
Latitude range: 0°-82° (90° optional)
Azimuth fine adjustment range: +/- 7.5°
Worm wheels: 250 teeth, 125 mm diameter (B14 bronze)
Worms: 20 mm diameter
Axes: 30 mm diameter (alloy steel)
Counterweight shaft: 30 mm diameter (stainless steel), weight 1.5 kg
Power supply: 24 V/3 A
GoTo speed: adjustable from 2°/s – 15°/s
Positioning accuracy: < 20″ with internal 25-stars software mapping – max. 100 stars
possibility to use the Model Maker software for automated alignment operation
Average tracking accuracy: ~ 1″ typical for 15 min ~ 0.6″ RMS with internal 25-stars software mapping and compensation of system flexures and polar alignment errors
Security stop: +/− 30° past meridian in r.a. (software) +/− 45° past meridian in r.a. (mechanical)
Transmission: Backlash-free system with timing belt and automatic backlash recovery
Pole adjustment: Alignment-Algorithms per Control
Control: QCI-control unit with Linux-operating system incl. handbox (computer independent)
PC control: Remote control via RS-232, Ethernet, proprietary 10Micron ASCOM driver, LX200 compatible protocol, update of firmware and orbital elements of comets, asteroids and artificial satellites via RS-232 or Ethernet, PC virtual KeyPad control panel via RS-232 or Ethernet, Integrated Wi-Fi for connection with smartphones and tablets and any wireless network
Firmware functions: 2 starsand 3 stars alignment function, storage of multiple pointing models up to 100 alignment stars for modeling
correction of polar alignment and orthogonality errors
automatic (ClockSync proprietary software) manual or GPS time & site coordinates synchronization
assisted electronic balance adjustment
defined park position
Remote Assist via Internet connection with dedicated server
Database: Stars: (Names, Bayer, Flamsteed), Bright Star Catalogue, SAO, HIP, HD, PPM, ADS, GCVS.
Deep-sky: M, NGC, IC, PGC ,UGC limited up to mV = 16.
Solar system: Sun, Moon, planets, asteroids, comets, artificial satellites.